Рис. 1.2. Узагальнена структура робота, що
взаємодіє з НС
1.4. Структура промислових роботів
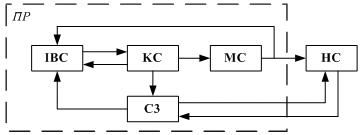
Структура ПР, який взаємодіє з НС (ОМ), може бути проілюстрована рис. 1.2 [33]. У загальному випадку робот складається з чотирьох систем:
1) виконавчої МС - для цілеспрямованої дії на НС (ОМ);
2) сенсорної інформаційно-вимірювальної (ІВС)
- для забезпечення робота інформацією про стан НС, результати дії на нього МС
(або взаємодії системи "робот - ОМ - НС") і стан самого робота у відповідності
з вимогами КС;
3) керуючої (інтелекту) - для формування закону
керування МС на основі даних, які надходять від керуючої програми та ІВС, а
також для організації спілкування робота з людиною чи іншими функціональними
пристроями, з якими він взаємодіє (інтелектуальні здатності робота визначаються
алгоритмічним і програмним забезпеченням його КС);
4) системи зв'язку (СЗ) - для організації
обміну інформацією між роботами і людиною чи іншими функціональними пристроями
(у тому числі роботами, основним технологічним обладнанням) на якійсь зрозумілій
їм мові.
Рис. 1.2. Узагальнена структура робота, що
взаємодіє з НС
Рівні інтелекту та інформаційного забезпечення ПР визначаються характеристикою НС, з яким взаємодіє (на яке діє) МС робота. В роботизованому виробництві під НС розуміють ОМ (або об'єкти роботизації), які мають знаходитись у невпорядкованому (і тоді середовище є непідготовленим, або неорганізованим), упорядкованому (підготовлене, або організоване, середовище) та частково впорядкованому станах. При невпорядкованому стані об'єкти різних класів займають хаотичне положення на предметній площині. В цьому випадку задачами інформаційної та керуючої систем ПР будуть: знаходження об'єкта на поверхні, визначення класу, а також поло-ження об'єкта за характерною ознакою та планування алгоритму керуючої дії на ланки МС робота з метою забезпечення оптимальних умов взаємодії робота із середовищем.
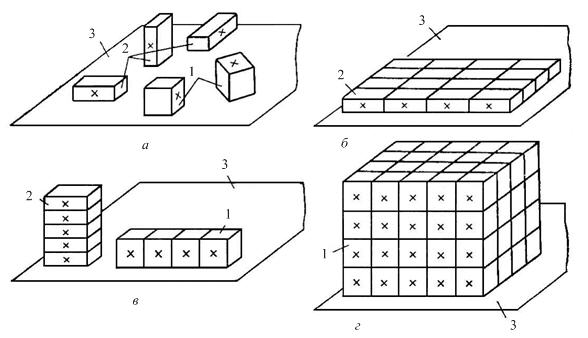
Рис. 1.3. Стани НС: невпорядкований (а), з поверхневим (б),
лінійним (в)
та об'ємним (г) нагромадженнями впорядковано розташованих об'єктів
З викладеного випливає, що зниження інформаційного навантаження та рівня інтелекту робота можливе, якщо заздалегідь підготувати середовище впорядкуванням об'єктів за класами, орієнтацією їх у просторі та один відносно одного. На рис. 1.3 показані приклади невпорядкованого (рис. 1.3, а) та впорядкованого (рис. 1.3, в) лінійних нагромаджень орієнтованих об'єктів класів 1 і 2, на рис. 1.3,б - поверхневого нагромадження об'єктів класу 2, на рис. 1.3, г - об'ємного нагромадження об'єктів класу 1 на предметній площині 3.
Маніпуляційна система
Задачею МС є виконання рушійних функцій і реалізація технологічного
призначення ПР. Ця система являє собою просторовий механізм з розімкненим кінематичним
ланцюгом. Конструктивно МС складається з таких основних вузлів: несучих конструкцій,
приводів, передавальних механізмів, виконавчих механізмів і ЗП.
Виконавчий механізм ПР - це сукупність рухомо з'єднаних ланок МС, призначених для дії на ОМ (НС).
Захватний пристрій ПР - орган його МС, призначений для захвату чи утримування об'єкта виробництва, технологічного оснащення чи інструменту. Як правило, ПР комплектують типовим (для даної моделі) набором ЗП, які замінюються або вручну (швидко-змінні ЗП), або автоматично в залежності від конкретного робочого завдання.
З'єднання ланок МС у кінематичний ланцюг здійснюється за допомогою кінематичних пар (у більшості конструкцій ПР використовуються кінематичні пари п'ятого класу - обертальні О чи поступальні П, які забезпечують один ступінь вільності у відносному русі кожної з двох рухомо з'єднаних ланок). Сукупність деякого числа рухомих ланок забезпечує виконавчому механізму певне число ступенів рухомості, яке є важливою характеристикою МС.
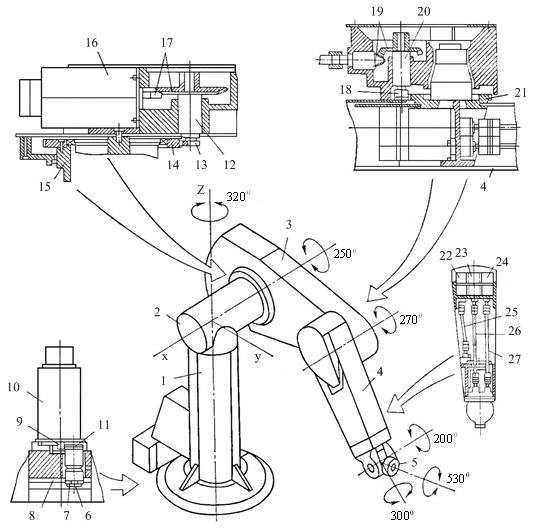
Рис. 1.4. Маніпуляційна система ПР: моделі РМ-01
Прикладом конструктивного рішення МС з розміщенням приводів виконавчих механізмів безпосередньо на його ланках може бути ПР моделі РМ-01 (рис 1.4). Це універсальний робот, призначений для виконання як основних, так і допоміжних операцій технологічних процесів. До основних операцій належать монтаж і складання механічних вузлів, дугове зварювання, операції склеювання та фарбування. Допоміжні операції, що виконуються роботом, містять завантаження та розвантаження обладнання, пакування та складування виробів тощо. Маніпулятор «РUМА» цього робота розроблений фірмою «NОКІА» (Фінляндія), він має антропоморфну конструкцію та шість ступенів рухомості, що у сукупності з гнучкою КС дає змогу йому виконувати різноманітні за фізичною суттю та послідовністю технологічні операції.
Кінематичні ланки маніпулятора з'єднані ротаційними шарнірами, а самі ланки нагадують кисть, лікоть та плече руки людини, що й надає конструкції антропоморфного характеру. Конструктивно маніпулятор виконаний у вигляді колони 1 (див. рис. 1.4), на якій шарнірно закріплено плече 2, що несе верхню руку 3 та передню руку (лікоть) 4. Кисть 5 має три ступені рухомості, а на її фланці закріплено різноманітні пристрої технологічного призначення: захвати, складальні та зварювальні головки тощо. Кожну з ланок обладнано автономним електромеханічним приводом, який складається з електродвигуна і передачі обертання шарнірів руки маніпулятора.
Привід повороту плеча навколо осі колони 1 складається з електродвигуна 10, який передає через зубчасту передачу 9 і 11, проміжний вал 7 і ведучу шестерню 6 обертання колесу 8, кінематичне зв'язаному з основою плеча 2. Таким чином передається обертання плечу навколо осі колони. Поворот же верхньої руки 3 відносно осі самого плеча здійснюється електродвигуном 16, розміщеним безпосередньо на корпусі руки. При цьому обертання від двигуна передається конічною зубчастою парою 17 і проміжним валом 12 шестерні 13, яка обкотується по нерухомо закріпленому у корпусі 15 колесу 14. В результаті верхня рука 3 повертається на кут, заданий керуючою програмою (КП).
Особливість конструкції передпліччя й ліктя маніпулятора полягає у тому, що частина робочого навантаження приймається їхніми зовнішніми кожухами. Це дає змогу мінімізувати маси рук, забезпечуючи при цьому їх достатню міцність. Електродвигун обертання передньої руки 4 також розміщений у корпусі верхньої руки. Цей двигун через конічну передачу 19, вал 20 і ведучу шестерню 18 передає обертання веденому колесу 21, в результаті чого і здійснюється відповідно до заданої програми поворот передньої руки 4.
Технологічні рухи кисті 5 навколо відповідних осей інструментальної системи координат здійснюються електродвигунами 22 - 24, кінематичне зв'язаними з кистю приводними валами 25 - 27 відповідно, причому на кожний приводний вал припадає по два редуктори, розміщені на початку і в кінці вала.
Керування маніпулятором ПР моделі РМ-01 базується на заданні та контролі переміщень і швидкостей ланок його руки. Відлік переміщень ведеться у базовій системі координат, початок якої збігається з віссю плеча маніпулятора. Базова система координат нерухома і використовується при навчанні робота переміщенням по точках. Рухома інструментальна система координат, з'єднана з фланцем кисті маніпулятора, використовується для програмування рухів робочих інструментів і захватів, розміщуваних на кисті робота.
Інформаційно-вимірювальна система
Задача ІВС - збирання, первинна обробка і передача в КС даних
про функціонування вузлів і механізмів ПР (у тому числі і блоків КС) та про
стан НС. За функціональним призначенням ІВС умовно поділяються на три підсистеми:
1) сприйняття й переробки інформації про НС, в якому функціонує ПР; 2) внутрішньої
інформації про стан вузлів, механізмів і систем ПР; 3) забезпечення техніки
безпеки. Дані цих під-систем створюють інформаційне забезпечення роботи ПР.
Підсистема зовнішньої інформації визначає функціональні мож-ливості ПР і ступінь складності вирішуваних ним завдань. Залежно від способу взаємодії з об'єктами НС ця підсистема може виконувати функції зорового (візуального, локаційного) і тактильного (дотику) сприйняття ознак середовища. Тактильне сприйняття використовується для виявлення об'єкта, встановлення моменту стикання з ним і визначення його розмірів, контролю тиску на об'єкт, виявлення підготовленості основного технологічного обладнання до обслуговування роботом, а також для забезпечення безпеки роботи. З цією ж метою, але із застосуванням безконтактних засобів використовується і зорове сприйняття; одночасно такі засоби переважно виконуються для дистанційного виявлення об'єкта і розв'язання задач ідентифікації класу та положення, яке займає об'єкт у просторі.
Підсистема внутрішньої інформації розв'язує задачі: оцінки положення і швидкості руху ступенів рухомості ПР, аварійної блокіровки для запобігання поломці вузлів МС і взаємодіючого з нею обладнання при появі випадкових збоїв, діагностики і прогно-зування ресурсу ГІР для виявлення причин відказів і скорочення часу відновлення працездатності ПР.
Керуюча система
Задачами КС є програмування дій МС, зберігання КП, її відтворення
і відпрацювання.
Керування роботом здійснюється на основі програми його роботи. Програма - повний і точний опис на деякій формальній мові процесу оброблення інформації, який приводить до розв'язання поставлених задач.
Керуюча програма - послідовність простих інструкцій на деякій формальній мові, виконуваних при додержанні певної черговості. Ці інструкції містять інформацію про послідовність виконання кроків програми, просторове положення окремих ступенів рухо-мості і час виконання окремих кроків програми та окремих КП. Матеріальний носій, в якому фіксується КП, називається програмоносієм.
Програмування - підготовка задачі керування для її розв'я-зання і введення інформації КП в запам'ятовуючий пристрій КС. Програмування здійснюється методами: навчання, розрахунку КП, самонавчання. У першому випадку КП формується в режимі діа-лога КС з оператором, який за допомогою ручного пульта керуван-ня роботом здійснює послідовне відпрацювання необхідних операцій з наступним занесенням інформації у запам'ятовуючий пристрій КС. При реалізації другого методу програму розраховують чи на обчислювальному центрі на одній із спеціалізованих мов або на мовах високого рівня, чи в самій КС за допомогою обчислювача за директивами оператора. Зрештою, при самонавчанні програма ПР утворюється на основі інформації, яка аналізується системою сприйняття НС з наступним запам'ятовуванням одержаної інформації й організацією відповідних команд.
Запам'ятовування КП - збереження протягом погрібного часу інформації КП у запам'ятовуючому пристрої. Для систем ЧПК ємність пам'яті такого пристрою визначається кількістю машинних слів або двійкових знаків. Для циклових систем ємність пам'яті - максимальна кількість керуючих команд. Ємність оперативної пам'яті запам'ятовуючого пристрою - максимальна кількість інформації КП, яка безпосередньо бере участь у поточному процесі виконання операцій керування ПР. Ємність зовнішнього запам'ятовуючого пристрою-максимальна кількість інформації, яка може тривало зберігатись на програмоносію.
Відтворення програми - зчитування інформації із запам'ятовуючою пристрою і передача керуючих сигналів до виконавчих механізмів ПР.
Відпрацювання програми - виконання ПР операцій відповідно до сигналів, переданих на його виконавчі механізми при відтворенні програми.